Скачать с ютуб Generative Design of Tendon-Driven Grippers [IROS 2024] в хорошем качестве
Generative Design of Tendon-Driven Grippers [IROS 2024]
8 дней назад
Скачать бесплатно и смотреть ютуб-видео без блокировок Generative Design of Tendon-Driven Grippers [IROS 2024] в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно Generative Design of Tendon-Driven Grippers [IROS 2024] или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон Generative Design of Tendon-Driven Grippers [IROS 2024] в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
Generative Design of Tendon-Driven Grippers [IROS 2024]
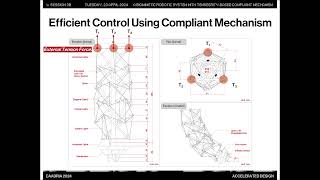
Robots' behavior and performance are determined both by hardware and software. The design process of robotic systems is a complex journey that involves multiple phases. Throughout this process, the aim is to tackle various criteria simultaneously, even though they often contradict each other. The ultimate goal is to uncover the optimal solution that resolves these conflicting factors. Generative, computation or automatic designs are the paradigms aimed at accelerating the whole design process. Within this paper we propose a design methodology to generate linkage mechanisms for robots with morphological computation. We use a graph grammar and a heuristic search algorithm to create robot mechanism graphs that are converted into simulation models for testing the design output. To verify the design methodology we have applied it to a relatively simple quasi-static problem of object grasping. Designing a fully actuated gripper may seem simple, but we found a way to automatically design an underactuated tendon-driven gripper that can grasp a wide range of objects. This is possible because of its structure, not because of sophisticated planning or learning. To test the applicability of the proposed method in real engineering practice, we used it to create physical prototypes. Simulation results together with results of testing of physical prototypes are given at the end of the paper. The framework is open source and the link to GitHub is given in the paper.
Comments




![Parametric Synthesis of Impact-Robust Shaftless Leg [IROS 2024]](https://i.ytimg.com/vi/kDr24R6_jyk/mqdefault.jpg)


![Звуковые иллюзии, которые работают на всех (почти) [Veritasium]](https://i.ytimg.com/vi/8pCuUfbdheE/mqdefault.jpg)
