Скачать с ютуб Parametric Synthesis of Impact-Robust Shaftless Leg [IROS 2024] в хорошем качестве
Parametric Synthesis of Impact-Robust Shaftless Leg [IROS 2024]
9 дней назад
Скачать бесплатно и смотреть ютуб-видео без блокировок Parametric Synthesis of Impact-Robust Shaftless Leg [IROS 2024] в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно Parametric Synthesis of Impact-Robust Shaftless Leg [IROS 2024] или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон Parametric Synthesis of Impact-Robust Shaftless Leg [IROS 2024] в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
Parametric Synthesis of Impact-Robust Shaftless Leg [IROS 2024]
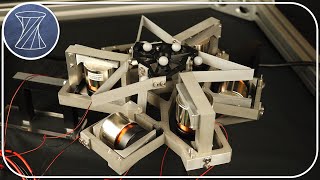
We present an optimization approach for integration of compliant joins in multi-link leg closed chain mechanisms. Despite inherent advantages such as reduced losses due to friction, no need in lubrication and lightweight construction compared to bearing units, compliant joints are underutilized in dynamic locomotion tasks due to design challenges. Using a morphological computation approach we optimize a compliant joint geometry. We have chosen three flexure cross hinge as the topology of the compliant joint since it has good longitudinal stiffness and uniformed stress distribution. Since too weak or too stiff flexures make the leg motion unfeasible, we choose the desired natural frequency of the entire leg in the interested mode shape. We simulate the compliant mechanism deformations using SPACAR toolbox with Simscape Multibody in MATLAB environment. To demonstrate the feasibility of the proposed method, we have modeled a prototype of the shaftless hopping robot and conducted physical experiments involving ramp jumping and hopping locomotion using a motion capture system. The results highlight the benefits of flexures integration such as impact robustness, energy recuperation, and suitability for environments where the capabilities of bearing units are limited.
Comments



![Generative Design of Tendon-Driven Grippers [IROS 2024]](https://i.ytimg.com/vi/x-ZUa6dm4V8/mqdefault.jpg)




