Скачать с ютуб From PID Control to Adaptive Control: Systematically Designing Controllers in Simulink в хорошем качестве
From PID Control to Adaptive Control: Systematically Designing Controllers in Simulink
2 года назад
Скачать бесплатно и смотреть ютуб-видео без блокировок From PID Control to Adaptive Control: Systematically Designing Controllers in Simulink в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно From PID Control to Adaptive Control: Systematically Designing Controllers in Simulink или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон From PID Control to Adaptive Control: Systematically Designing Controllers in Simulink в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
From PID Control to Adaptive Control: Systematically Designing Controllers in Simulink
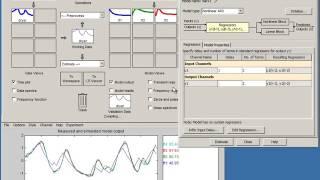
While PID control continues to be ubiquitous, other control techniques such as adaptive control and learning-based control are gaining more acceptance. In this session, MathWorks engineers will walk you through how you can use systematic and automated ways to quickly design and implement different types of controllers, ranging from PID controllers to model reference adaptive controllers. Through demonstrations, you will learn how to: Automatically tune PID controllers for SISO, MIMO, and gain scheduled control systems. Generate code to automatically tune PID controllers on hardware such as Speedgoat target computers or Texas Instruments C2000 microcontrollers Implement model-free adaptive control techniques such as extremum seeking and model reference adaptive control for systems with unknown or changing plant dynamics and disturbances. Use the links below to experiment with the demos used in this webinar: 1) PID tuning with estimated plant model from IO data: https://bit.ly/3yRacmy 2) Helicopter MIMO control: https://bit.ly/3MxOF6z 3) Motor control using FOC Autotuner block: https://bit.ly/3NoX0cC 4) Aircraft wing rock disturbance rejection using wing rock: https://bit.ly/38KCtAq 0:00 – Introduction 2:02 – Control design workflows in Simulink 5:07- Tuning a PID controller to meet design specifications 10:09- Tuning a PID controller when Simulink model is not available 18:24- Tuning MIMO controllers 28:43- Tuning PID controllers in real-time 35:53- Designing adaptive controllers 44:25- Summary
Comments