Скачать с ютуб Real time Kalman filter on an ESP32 and sensor fusion. в хорошем качестве
Real time Kalman filter on an ESP32 and sensor fusion.
3 года назад
Kalman filter
discrete-time
implementation
digital control
robotics
arduino
MPU6050
ESP32
c++
Segway
Quadcopters
control systems
feedback
optimal control
MATLAB
electronic engineering
electrical engineering
AUT
Auckland University of Technology
sensor fusion
accelerometer
rate gyro
hobby electronics
negative feedback
Скачать бесплатно и смотреть ютуб-видео без блокировок Real time Kalman filter on an ESP32 and sensor fusion. в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно Real time Kalman filter on an ESP32 and sensor fusion. или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон Real time Kalman filter on an ESP32 and sensor fusion. в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
Real time Kalman filter on an ESP32 and sensor fusion.
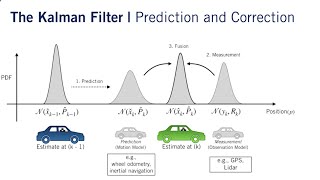
Implementing a discrete-time Kalman filter (steady-state). A bit of theory and a practical demonstration. Uses the Arduino software. Acknowledgement to random nerd tutorials too. Measures pitch angle and will be suitable for some balancing projects such as a Segway or Quad copters. Uses sensor fusion of accelerometer and gyro readings. The steady state Kalman filter is implemented in closed-loop form and in state-space format. The relationship to a Wiener estimator I will show in more detail later. This requires a transfer function matrix but is not used here.
Comments