Скачать с ютуб Computational Fluid Dynamics Explained в хорошем качестве
Computational Fluid Dynamics Explained
5 лет назад
Скачать бесплатно и смотреть ютуб-видео без блокировок Computational Fluid Dynamics Explained в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно Computational Fluid Dynamics Explained или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон Computational Fluid Dynamics Explained в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
Computational Fluid Dynamics Explained
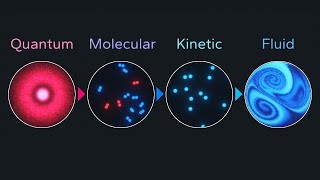
To learn more about adjoint shape optimization: • Aerodynamic Shape Optimization - The ... In this video, we’ll explain the basic principles of CFD or computational fluid dynamics. Modeling involves the continuous mathematical functions that you use to describe the real flow. In reality, that flow is the result of many different laws of physics working together. To limit computational effort, it’s a matter of selecting only the ones that have a substantial impact on your flow topic: if you’re calculating the aerodynamic force on a wing, for example, there’s little use in taking the gravitational pull of the moon into account, as the effect is negligible. So, defining correct & relevant models is important to limit the modeling errors: In case of fluid mechanics, the most important model is a set of partial differential equations called the “Navier Stokes” equations. These basically apply the laws of Newton for every small bit of the fluid, stating the dynamic balance between the forces acting on it and the change in its momentum. This conservation of momentum, together with the conservation of mass, allows you to describe the flow field. For some very simple cases, like laminar flow through a pipe, there are analytical solutions: the entire flow field can be described using continuous mathematical functions. These allow you to calculate the exact velocity & pressure for any given location in the flow field at an infinite resolution. But for anything more complex than these very simple cases, we don’t have such an analytical solution. That means we need to break down reality into small blocks for which we do have a solution. These blocks can be finite elements or finite volumes, also called cells. Think of it as the difference between analog and digital photography, where a complex image is described by simple pixels, each having just one color. This process of breaking down a large continuous flow field into small cells is called meshing. For each of these cells, we can approximate the continuous Navier-Stokes equations by discrete algebraic equations. These allow us to calculate the pressure & velocity at the center of each cell, which is called the node, based on the values of velocity & pressure of the surrounding nodes. The higher the order of these discrete approximations, the more surrounding nodes are included. This “reach” is called the computational molecule, resulting in a set of algebraic equations for each node. As the value of one node depends on the value of neighboring nodes and vice versa, the equations are connected. This means you need to solve them simultaneously by putting them together in a big matrix. But before we discuss how to solve this matrix, we need to talk about the discretization error: “The difference between the exact solution of the governing equations and the exact solution of the discrete approximation”. The more cells you apply, the smaller this error. But this also increases the number of equations you need to solve, and with meshes typically containing millions of cells, this quickly becomes very expensive. So you’re best off applying small cells to locations where the flow is complex, and large cells where the flow is less curvy, typically further away from the object. Once you have defined your mesh and your matrix of equations, it’s time to solve them. It’s possible to find the exact solution of this matrix problem through a direct method like Gauss elimination or LU decomposition. But this is very costly in terms of computational power and why bother solving the equations down to computer accuracy level, when your discretization error is much bigger anyway? This is where faster iterative methods come in: they start by “guessing” an initial solution, which could even just be a standstill flow field, or “zero velocity” for every point. Then they linearize the equations around that point and improve the solution through iteration. If you iterate long enough, the flow field will converge to a stable solution, reducing the iteration error. The difference between this solution and the direct solution of the equations is called the iteration error. ----------------------------------------------------------------------------------------------------------- The AirShaper videos cover the basics of aerodynamics (aerodynamic drag, drag & lift coefficients, boundary layer theory, flow separation, reynolds number...), simulation aspects (computational fluid dynamics, CFD meshing, ...) and aerodynamic testing (wind tunnel testing, flow visualization, ...). We then use those basics to explain the aerodynamics of (race) cars (aerodynamic efficiency of electric vehicles, aerodynamic drag, downforce, aero maps, formula one aerodynamics, ...), drones and airplanes (propellers, airfoils, electric aviation, eVTOLS, ...), motorcycles (wind buffeting, motogp aerodynamics, ...) and more! For more information, visit www.airshaper.com
Comments