Скачать с ютуб CDC 2021 Presentation - Force-and-moment-based MPC for Highly Dynamic Bipedal Robots в хорошем качестве
CDC 2021 Presentation - Force-and-moment-based MPC for Highly Dynamic Bipedal Robots
2 года назад
Скачать бесплатно и смотреть ютуб-видео без блокировок CDC 2021 Presentation - Force-and-moment-based MPC for Highly Dynamic Bipedal Robots в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно CDC 2021 Presentation - Force-and-moment-based MPC for Highly Dynamic Bipedal Robots или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон CDC 2021 Presentation - Force-and-moment-based MPC for Highly Dynamic Bipedal Robots в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
CDC 2021 Presentation - Force-and-moment-based MPC for Highly Dynamic Bipedal Robots
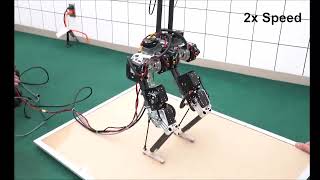
Paper: https://ieeexplore.ieee.org/document/... Experiments are out! : • Introducing Hector - Humanoid for Enh... Abstract: In this paper, we propose a novel framework on force-and-moment-based Model Predictive Control (MPC) for dynamic legged robots. In specific, we present a formulation of MPC designed for 10 degree-of-freedom (DoF) bipedal robots using a simplified rigid body dynamics with input forces and moments. This MPC controller will calculate the optimal inputs applied to the robot, including 3-D forces and 2-D moments at each foot. These desired inputs will then be generated by mapping these forces and moments to motor torques of 5 actuators on each leg. We evaluate our proposed control design on physical simulation of a 10 degree-of-freedom (DoF) bipedal robot. The robot can achieve fast walking speed up to 1.6 m/s on rough terrain, with accurate velocity tracking. With the same control framework, our proposed approach can achieve a wide range of dynamic motions including walking, hopping, and running using the same set of control parameters.
Comments