Скачать с ютуб Second order differential equation for spring-mass systems в хорошем качестве
Second order differential equation for spring-mass systems
10 месяцев назад
Скачать бесплатно и смотреть ютуб-видео без блокировок Second order differential equation for spring-mass systems в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно Second order differential equation for spring-mass systems или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон Second order differential equation for spring-mass systems в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
Second order differential equation for spring-mass systems
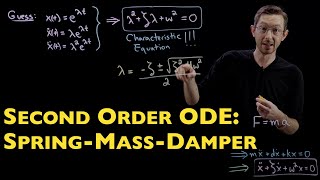
Let's look at modeling the motion of a spring-mass system (a harmonic oscillator) using a second-order differential equation. From Newton's Second Law, we arrive at mx'' + cx' + kx = 0 (or a forcing function), where x(t) is the position of the spring-mass over time, m is the mass, c is the damping coefficient, and k is the constant from Hooke's Law. We focus on the effects of damping and how to detect what kind of damping a spring-mass system has based on the roots of the characteristic equation. Four types of spring motion are discussed based on the roots: undamped (no damping force), underdamped (small damping), critically damped (damping force just prevents oscillation), and overdamped (large damping). Different damping leads to different behaviors, which we can illustrate with MATLAB simulations. #mathematics #math #differentialequations #ordinarydifferentialequations #stemeducation #harmonicoscillator #hookeslaw #physics #matlab #matlabsimulation #iitjammathematics
Comments