Скачать с ютуб LSD-SLAM: Large-Scale Direct Monocular SLAM (ECCV '14) в хорошем качестве
LSD-SLAM: Large-Scale Direct Monocular SLAM (ECCV '14)
10 лет назад
Скачать бесплатно и смотреть ютуб-видео без блокировок LSD-SLAM: Large-Scale Direct Monocular SLAM (ECCV '14) в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно LSD-SLAM: Large-Scale Direct Monocular SLAM (ECCV '14) или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон LSD-SLAM: Large-Scale Direct Monocular SLAM (ECCV '14) в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
LSD-SLAM: Large-Scale Direct Monocular SLAM (ECCV '14)
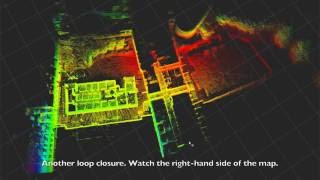
Open-Source Code Available! see http://vision.in.tum.de/lsdslam Publication: LSD-SLAM: Large-Scale Direct Monocular SLAM (J. Engel, T. Schöps, D. Cremers), ECCV 2014. Authors: Jakob Engel Thomas Schöps Daniel Cremers Short Abstract: LSD-SLAM is a novel, direct monocular SLAM technique: Instead of using keypoints, it directly operates on image intensities both for tracking and mapping. The camera is tracked using direct image alignment, while geometry is estimated in the form of semi-dense depth maps, obtained by filtering over many pixelwise stereo comparisons. We then build a Sim(3) pose-graph of keyframes, which allows to build scale-drift corrected, large-scale maps including loop-closures. LSD-SLAM runs in real-time on a CPU, and even on a modern smartphone.
Comments




![[Open Source] VINS-Mono: Monocular Visual-Inertial System in EuRoC MAV Dataset (MH_05 V1_03)](https://i.ytimg.com/vi/mv_9snb_bKs/mqdefault.jpg)