Скачать с ютуб Intro2Robotics Lecture 9a: Inverse Kinematics Position в хорошем качестве
Intro2Robotics Lecture 9a: Inverse Kinematics Position
7 лет назад
Скачать бесплатно и смотреть ютуб-видео без блокировок Intro2Robotics Lecture 9a: Inverse Kinematics Position в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно Intro2Robotics Lecture 9a: Inverse Kinematics Position или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон Intro2Robotics Lecture 9a: Inverse Kinematics Position в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
Intro2Robotics Lecture 9a: Inverse Kinematics Position
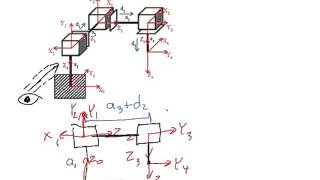
This lecture is on Inverse Kinematics. We start by showing how to solve for the rotation angles of a spherical wrist, given the desired orientation of the end-effector and the orientation generated by the first 3 links of the robot. This turns out to be the ZYZ Euler angles we derived in lecture 4. Next, we walk through an example of how to solve the position parameters of a robot by projecting each link onto the previous coordinate frame and solving a geometric problem. We must remember to solve for all possible solutions. The solution at 9:28 should be (z_c-d_1)^2 instead of [(z_c^2-d_1^2)^2] in the equation for Cos(\theta_3) and should be (z_c-d_1) instead of (z_c^2-d_1^2) in the middle equation for theta_2. Thanks Aniketh for the fix. [incorrect due to wrong substitution for `s` which should have been just (z_c-d_1)]. Also remember that cos(𝜃_𝑐) = cos(𝜋 − 𝜃_3 ) = −cos(𝜃_3).
Comments