Скачать с ютуб Position Control of Differential Drive Mobile Robot - Complete Tutorial with Simulation Animation в хорошем качестве
Position Control of Differential Drive Mobile Robot - Complete Tutorial with Simulation Animation
11 месяцев назад
Скачать бесплатно и смотреть ютуб-видео без блокировок Position Control of Differential Drive Mobile Robot - Complete Tutorial with Simulation Animation в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно Position Control of Differential Drive Mobile Robot - Complete Tutorial with Simulation Animation или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон Position Control of Differential Drive Mobile Robot - Complete Tutorial with Simulation Animation в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
Position Control of Differential Drive Mobile Robot - Complete Tutorial with Simulation Animation
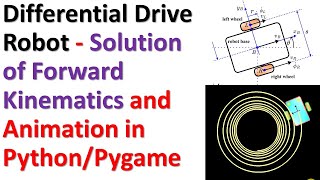
#robotics #roboticstutorials #roboticstraining #roboticsengineering #slam #pygame #mechanicalengineering #mechatronics #roboticseducation #automation #plc #controlengineering #kinematics #mechanics #dynamics #dynamicalsystems #electricalengineering #aerospacetutorials #aerospace #machinelearning #controltheory #optimalcontrol #optimization Professional ROS1/ROS2 courses and training: https://cyberneticsstemacademy.com/co... The Python code files used to implement the controller and generate the animation are given here (a fee is required): https://ko-fi.com/s/5e3bd8cf32 It takes a significant amount of time and energy to create these free video tutorials. You can support my efforts in this way: Buy me a Coffee: https://www.buymeacoffee.com/Aleksand... PayPal: https://www.paypal.me/AleksandarHaber Patreon: https://www.patreon.com/user?u=320801... You Can also press the Thanks YouTube Dollar button In this control engineering and robotics tutorial, we explain the basics of position controllers for mobile robots. As a test case, we use a differential drive robot. Differential drive robots are also called differential wheeled robots. We design a simple proportional controller that will drive the robot center from the initial to the desired location. We use a kinematics robot model developed in our previous tutorial to simulate the robot’s motion. We explain how to generate a 2D Pygame animation that simulates the robot’s motion and control performance. Here, it should be kept in mind that we develop a controller that is based on the kinematics of the robot without taking into account the robot’s dynamics described by mass, moments of inertia, and dynamics equations.
Comments