Скачать с ютуб Degradation Resilient LiDAR-Radar-Inertial Odometry в хорошем качестве
Degradation Resilient LiDAR-Radar-Inertial Odometry
9 месяцев назад
Скачать бесплатно и смотреть ютуб-видео без блокировок Degradation Resilient LiDAR-Radar-Inertial Odometry в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно Degradation Resilient LiDAR-Radar-Inertial Odometry или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон Degradation Resilient LiDAR-Radar-Inertial Odometry в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
Degradation Resilient LiDAR-Radar-Inertial Odometry
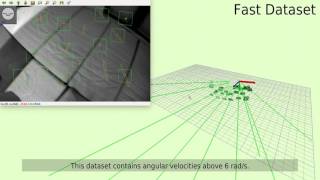
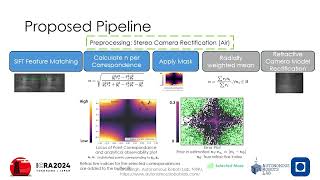
Enabling autonomous robots to operate robustly in challenging environments is necessary in a future with increased autonomy. For many autonomous systems, estimation and odometry remains a single point of failure, from which it can often be difficult, if not impossible, to recover. As such robust odometry solutions are of key importance. In this work a method for tightly-coupled LiDAR-Radar-Inertial fusion for odometry is proposed, enabling the mitigation of the effects of LiDAR degeneracy by leveraging a complementary perception modality while preserving the accuracy of LiDAR in well-conditioned environments. The proposed approach combines modalities in a factor graph-based windowed smoother with sensor information-specific factor formulations which enable, in the case of degeneracy, partial information to be conveyed to the graph along the non-degenerate axes. The proposed method is evaluated in real-world tests on a flying robot experiencing degraded conditions including geometric self-similarity as well as obscurant occlusion. For the benefit of the community we release the datasets presented: https://github.com/ntnu-arl/lidar_deg...
Comments





![SPAD Cameras & Arrays: A new alternative to PMT, EMCCD, ICCD [Webinar]](https://i.ytimg.com/vi/V5QwsjD39aw/mqdefault.jpg)